


IMU (Daxili Ölçmə Bloku) Nədir?

Smartfonunuzu yan çevirəndə ekranın avtomatik dönməsi, dronların havada sabit qalması və ya "SpaceX" raketlərinin dikinə eniş etməsi... Bütün bu mühəndislik möcüzələrinin arxasında kiçik, lakin dahi bir sensor dayanır: IMU (Inertial Measurement Unit). Daxili Ölçmə Bloku müasir geodeziya, robototexnika, pilotsuz uçuş aparatları (dronlar) və avtonom nəqliyyat sistemlərində yüksək dəqiqliklə mövqe və orientasiya təyinində kritik komponentlərdən biridir.
IMU – cismin xətti sürətlənməsini, bucaqlı sürətini və bəzən maqnit sahəsinə görə orientasiyasını ölçən sensorlar toplusudur. Yəni, IMU obyektin haraya doğru hərəkət etdiyini, nə qədər sürətlə döndüyünü, məkan daxilində hansı vəziyyətdə (orientasiyada) olduğunu ölçmək üçün istifadə olunur.
IMU-nun əsas komponentləri
1. Akselerometr.
Akselerometr cismin x, y, z oxları üzrə xətti sürətlənməsini ölçür. Cismin hansı sürətlə irəli, geri və ya yuxarı-aşağı getdiyini deyir. Həmçinin qravitasiyanı (yerçəkimi) hiss etdiyi üçün cihazın "aşağı" istiqamətini müəyyən edir. Akselerometrlər vibrasiyaya qarşı çox həssasdır. Məsələn, bir dronun motor vibrasiyası akselerometr məlumatlarını tamamilə yararsız hala sala bilər.
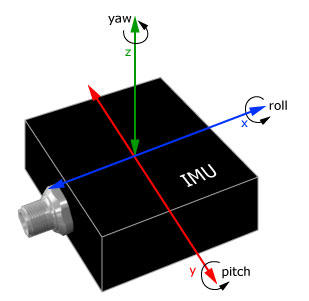
2. Giroskop
Dönmə sürətini (bucaq sürəti) ölçür. Cihazın öz oxu ətrafında neçə dərəcə döndüyünü təyin edir. Giroskoplar zaman keçdikcə kiçik xətalar toplayır. Cihaz sabit dursa belə, hiroskop onun yavaşca döndüyünü zənn edə bilər. Buna "gyro drift" deyilir. IMU, daxilindəki akselerometr və giroskop vasitəsilə cihazın hərəkətini daxildən ölçür. O, xarici siqnala ehtiyac duymur. GPS tuneldə itəndə, IMU sonuncu məlum koordinatdan etibarən cihazın hansı sürətlə və hansı istiqamətə döndüyünü hesablayaraq yolu "təxmin edir".

Yerin maqnit sahəsini ölçərək cihazın şimal istiqamətinə görə vəziyyətini (kompas funksiyası) müəyyən edir.

GNSS bizə harada olduğumuzu deyir, IMU isə necə hərəkət etdiyimizi. Bu iki texnologiyanın vəhdəti İnersial Naviqasiya Sistemi (INS) adlanır. Bu məlumatlar xüsusi alqoritmlərlə (Kalman filter) emal olunur və nəticədə: Mövqe, Sürət və Orientasiya hesablanır.